Quadcoptère : quatre rotors… 4 moteurs. La plupart des drones que nous volons en 2019 sont des quadcoptères, c’est-à-dire des drones équipés de 4 moteurs. Ici, nous expliquons aussi simplement que possible le flux physique du vol avec ce type de configuration afin que vous puissiez mieux comprendre le fonctionnement de votre avion. Commandes Tout d’abord, commençons par les commandes. La plupart des drones sont expédiés en mode 2. C’est-à-dire que la télécommande est programmée comme suit : accélérateur sur le bâton gauche. Vous pouvez passer au mode 1, mais il est moins universel. Faites le bon choix, il vous sera difficile de les changer après avoir appris les bases et intégrer les réflexes.
Les télécommandes de drones ne se valent pas toutes, mais la grande majorité des modèles sont livrés en mode 2. Ici, la manette gauche sert à gérer la puissance (gaz) et la rotation (lacet), tandis que la manette droite commande le tangage (avant/arrière) et le roulis (gauche/droite). Changer de mode reste possible, mais une fois vos habitudes prises, difficile de faire marche arrière.
A lire aussi : Pourquoi l'hydrogène ne gagne-t-il pas d'électrons ? Importance en chimie
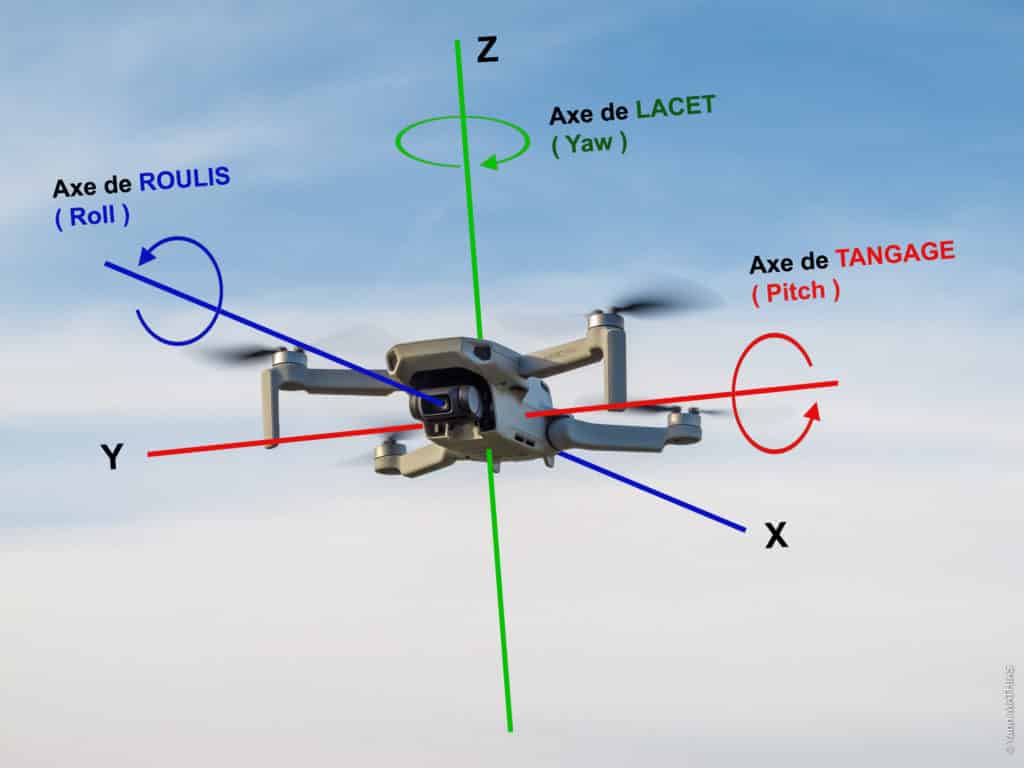
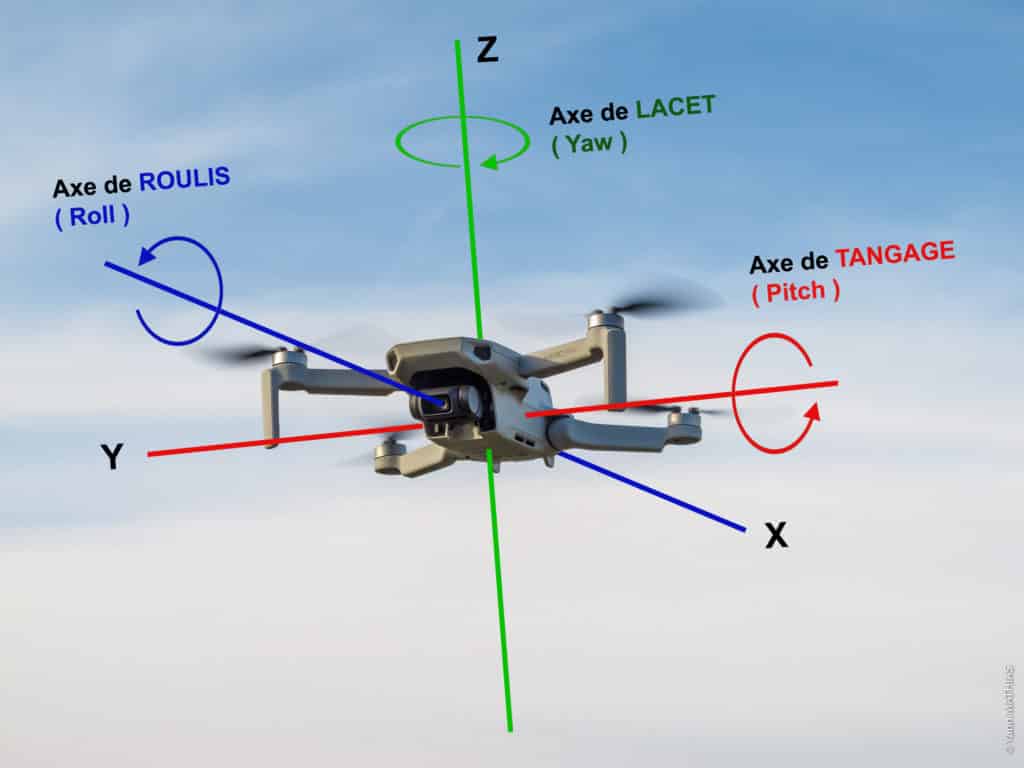
Avant de vous lancer dans des figures ou de voler en extérieur, il est judicieux de passer du temps à vous familiariser avec ces axes de vol. Les mouvements doivent devenir aussi naturels que manipuler un volant ou passer un rapport. Ceux qui souhaitent vraiment affiner leur pilotage gagnent à tester un drone manuel, sans assistance électronique. L’apprentissage y est certes plus rude, mais c’est là que se forment les vrais réflexes de pilote. Si le sujet vous intrigue, consultez notre article sur l’école des drones pour aller plus loin.
A lire également : Survoler des personnes avec un drone : ce que la loi autorise
Les principes du vol stationnaire
Quand un drone quadrirotor reste sur place, ses quatre moteurs tournent à la même vitesse. C’est cet équilibre qui maintient l’engin en l’air, sans qu’il ne grimpe ni ne chute. Pour monter, il suffit d’augmenter la puissance sur tous les moteurs via la manette de gaz : le drone prend de l’altitude. À l’inverse, si la puissance diminue, l’appareil redescend, soumis à son poids et à la gravité.
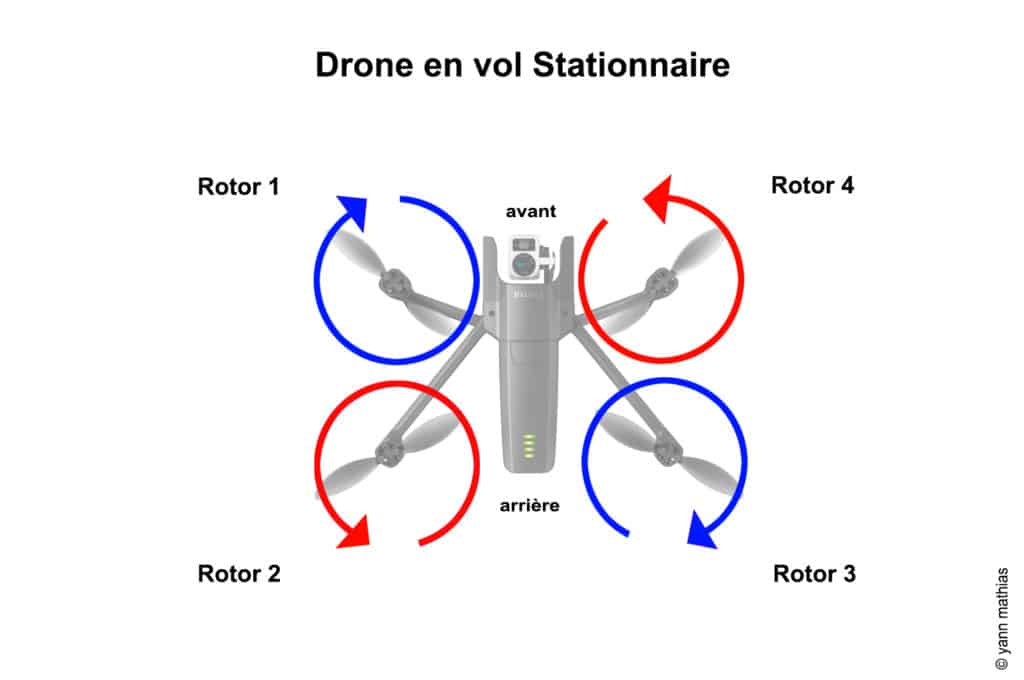
Un détail technique mais fondamental : tous les rotors ne tournent pas dans le même sens. Sur un quadrirotor, deux moteurs (M1 et M3) tournent dans le sens horaire, tandis que les deux autres (M2 et M4) tournent en sens inverse. Ce croisement annule les effets de couple qui feraient sinon basculer ou tourner le drone sur lui-même. Voilà pourquoi ces machines restent stables, même lorsqu’on les sollicite brutalement.
Faire avancer ou reculer le drone
Pour déplacer l’appareil vers l’avant ou l’arrière, c’est l’axe de tangage qui entre en jeu, commandé par la manette droite. Lorsque vous poussez le stick en avant, les moteurs avant voient leur puissance réduite, tandis que ceux de l’arrière accélèrent : le drone s’incline et avance. Pour reculer, c’est simplement l’inverse : puissance accrue à l’avant, diminuée à l’arrière.
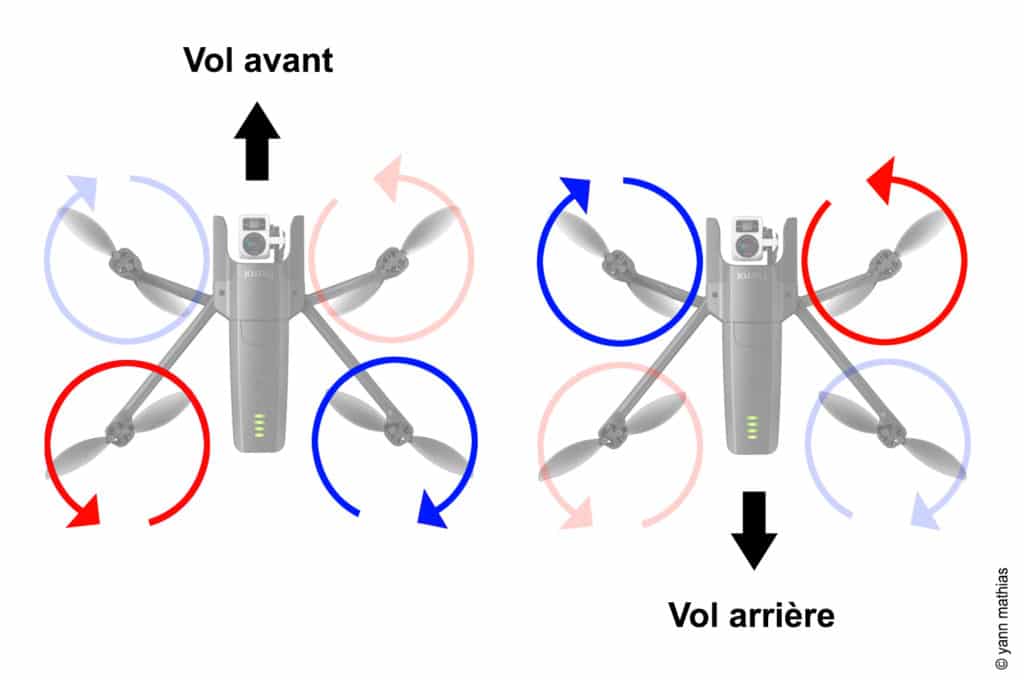
Le même principe s’applique pour chaque déplacement longitudinal : tout est affaire de variation de régime entre les moteurs opposés.
Déplacement latéral : aller à gauche ou à droite
Pour basculer d’un côté à l’autre, c’est l’axe de roulis qui intervient. Toujours avec la manette droite, cette fois vers la gauche ou la droite, on agit sur la puissance des moteurs situés de chaque côté du drone : ceux du côté où l’on souhaite aller ralentissent, ceux de l’autre accélèrent, créant une inclinaison latérale et un déplacement fluide.
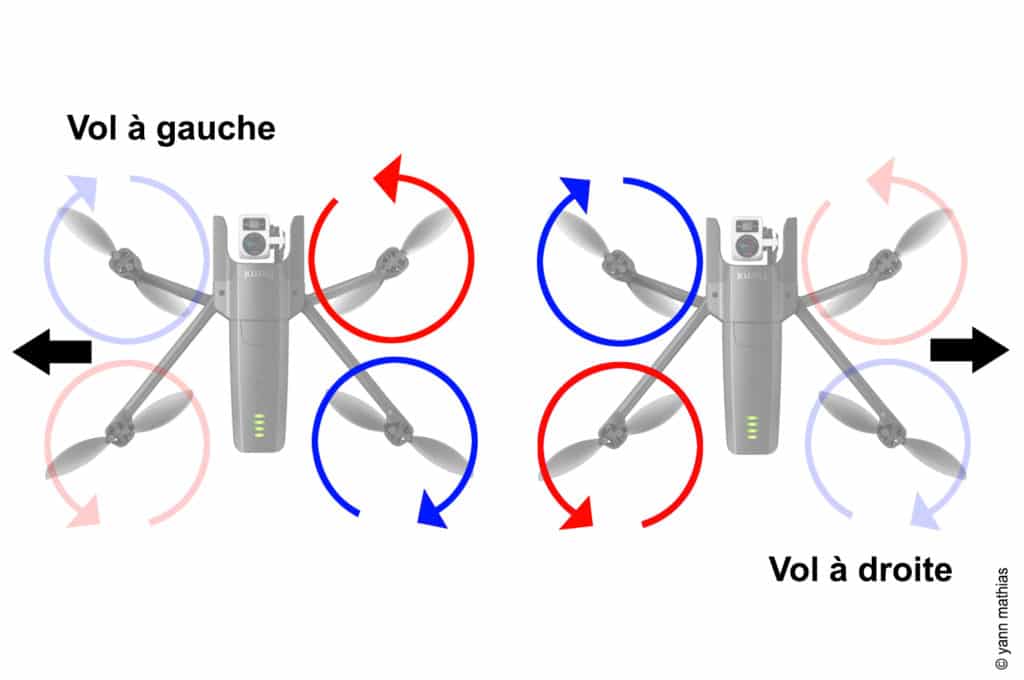
Concrètement, pour aller à gauche, les moteurs à gauche tournent moins vite et ceux de droite plus fort, et inversement pour un déplacement à droite. Cette répartition intelligente de la puissance permet d’enchaîner les virages avec précision.
Rotation sur place (axe de lacet)
Pour faire pivoter le drone sur lui-même, la commande se fait avec la manette gauche, à gauche ou à droite. Tourner à droite implique d’augmenter la puissance des moteurs 2 et 4, tout en réduisant celle des moteurs 1 et 3, et vice versa pour tourner à gauche. Ce réglage précis compense les effets de couple inhérents aux hélices et permet d’obtenir une rotation contrôlée, sans perte de stabilité.
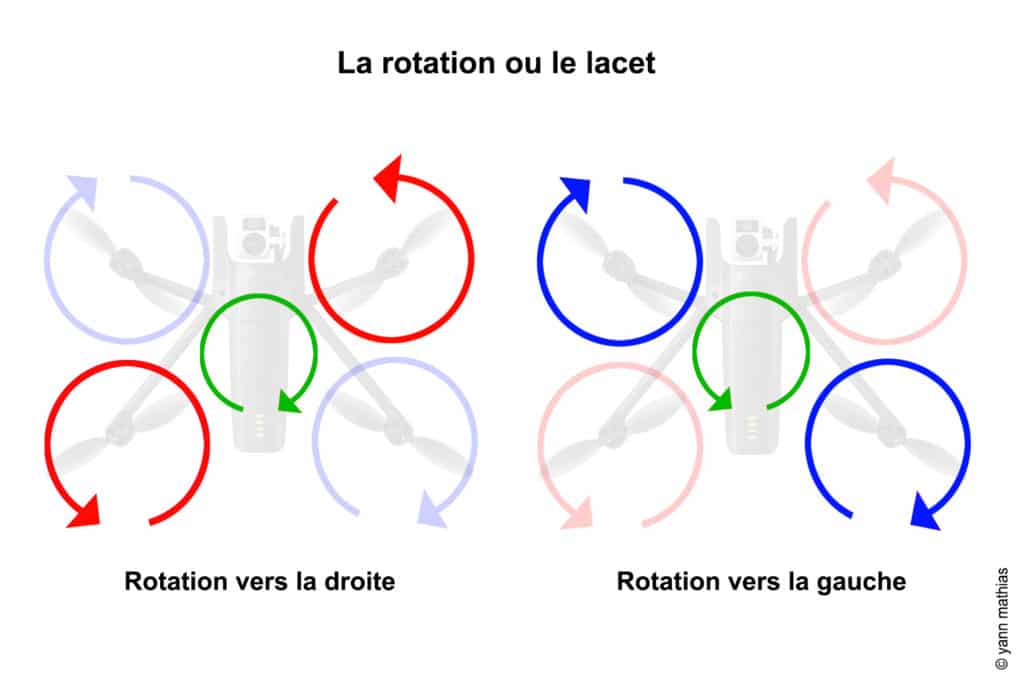
Ce phénomène est directement lié à la mécanique des hélices : chaque variation de vitesse crée un couple qui amène le drone à tourner sur son axe, un principe clé du pilotage quadrirotor.
Voici un tour d’horizon des mécanismes les plus utilisés pour garder le contrôle d’un drone en vol. Sur un modèle stabilisé, tout semble presque trop simple : l’électronique compense la plupart des écarts. Mais dès que l’on passe sur un appareil manuel, chaque mouvement sollicite plusieurs axes à la fois. Prenons un exemple : avancer implique de corriger en même temps la puissance des moteurs pour ne pas perdre d’altitude. D’autres facteurs s’invitent à la fête, comme l’effet de sol ou les turbulences d’air qui compliquent la tâche. Et pour ceux qui aiment les défis, le vol inversé ajoute encore un niveau de complexité, mais ceci fera l’objet d’un prochain épisode.
Recevez chaque mois un billet gratuit sur le pilotage : inscrivez-vous à notre newsletter. Prochain sujet en janvier : maîtriser le drone en hiver.
Leçon #1 : Qu’est-ce qu’un Dronelemon n°3 : ReverseFlight
YannMathias